
وضوح تصویر
مهم ترین انتظاراتی که از یک دوربین امنیتی می رود، وضوح دوربین و میزان روشنایی تصاویر ارایه شده توسط آن است. منظور از وضوح در واقع کمیتی است که نشان میدهد تصویری که توسط دوربین ارایه شده است تا چه مقدار شفاف و خوانا است. وضوح دارای دو شاخص افقی و عمودی است. منظور از وضوح افقی تعداد خطوط سیاه و سفیدی عمودی است که با چشم به راحتی می تواند از تصویری که توسط دوربین تهیه شده است دیده شود. در مقابل منظور از وضوح عمودی تعداد حداکثر خطوط افقی است که دوربین می تواند برای تهیه تصویر از آن استفاده نماید. مقدار این وضوح در سیستم های آنالوگ با وضوح سیستم اسکن مورد استفاده ( PAL, SECAM , NTSC ) محدود شده است .
حداقل میزان روشنایی تصاویر
در واقع حداقل چگالی نوری است که از شئ مورد نظر باید تابیده شود تا دوربین به تواند از آن تصویر مناسبی ارایه دهد. واحد سنجش روشنایی بر حسب لوکس است و هر لوکس در واقع میزان روشنایی یک متر مربع از سطحی است که شدت نوری برابر یک لومن بر آن تابیده شود. به صورت تجربی می توان گفت که روشنایی یک لوکس میزان نوری است که از یک شمع در فاصله یک متری دیده می شود.
گستره پویا و یا دامنه دینامیک
نسبت بین حداکثر و حداقل شدت نور قابل اندازه گیری سیاه و سفید را گستره پویا و یا دامنه دینامیک می نامند. در دنیای واقعی، سیاه یا سفید واقعی هیچ گاه بافتنی نیستند و تنها در چات مختلف شدت نور منبع و انعکاس سوژه وجود دارند. به همین سبب مفهوم گستره پویا پیچیده تر می شود، چشم انسان گستره پویای مخصوص خود را دارد و به همین دلیل تفسیر اطلاعات تصویر پر گرفته از دوربین ممکن است بر چگونگی تولید دوباره تصویر تأثیرگذار باشد. مفهوم گستره پویا می تواند به همین خاطر در مقایسه های نسبی بین صحنه واقعی، دوربین و تصویر بر روی صفحه نمایشگر با پرینتر مفید باشد.
گرچه مفهوم گستره پویا در صحنه های دنیای واقعی، به سادگی نسبت بین تاریک ترین و روشن ترین مناطق عکس است (نسبت تضاد)، ولی معنای آن زمانی که ابزارهای اندازه گیری مانند دوربین با اسکنر دخیل باشند، پیچیده تر می شود. نور در هر پیکسل در یک گودال یا چاله به نام فوتوسایت اندازه گیری می شود و اندازه هر فوتوسایت و این که چطور محتوای آن اندازه گیری می شود، تعیین کننده گستره پویای یک دوربین دیجیتال است.
نکته: در برخی از دوربین ها، گزینه ای برای تنظیمات ایزو پایین تر وجود دارد که نویز کمتری تولید می کند، ولی گستره پویا را نیز کاهش می دهد.
روشنایی و انعکاس
شدت نور به دو صورت نور مستقیم و انعکاسی معنا می شود که هر دو بر گستره پویای صحنه اثرگذارند. صحنه هایی با تغییرات انعکاسی بالا، مانند اشیا سیاه در کنار انعکاس شدید، در واقع گستره پویای بالاتری نسبت به صحنه هایی که گوناگونی نورهای مستقیم بزرگ در آن هاست. دارند. تصاویر در هر کدام از این شرایط به راحتی از گستره پویای دوربین فراتر میرود، بخصوص اگر نوردهی دقیق نباشد، به همین خاطر محاسبه دقیق شدت نور، یا روشنایی، در ارزیابی گستره پویا بسیار مهم است که در این جا از عبارت روشنایی برای مشخص کردن نور مستقیم استفاده می شود. اگر صحنه ای به صورت ناهمگون با در نور مستقیم و پشت ابر روشن شود. همین به تنهایی گستره پویایی تصویر را افزایش بسیاری خواهد داد.
اشباع و سطح سفیدی دوربین
فوتو سایت ها را می توان مانند سطل هایی فرض کرد که فوتون ها را، انگار که آب باشند. در خود نگه می دارند، بنابرین اگر سطلی بیش از حد پر شود، سرریز می کند. فوتو سایتی که سرریز کند به اصطلاح اشباع می شود و نمی تواند فوتون های ورودی اضافی را تشخیص دهد. این تعریف سطح سفیدی دوربین است.
نسبت تباین، تضاد یا کنتراست
برای یک دوربین ایده آل، نسبت تباین تعداد فوتون هاییست که هر فوتوسایت آن می تواند در خود نگه دارد، تقسیم بر تیره ترین شدت نور قابل اندازه گیری (یک فوتون). برای مثال اگر هر کدام۱۰۰۰ فوتون نگه دارند. نسبت تیاین ۱:۱۰۰۰ خواهد بود.
سطح سیاهی
در واقعیت، دوربین ها نمی توانند تک فوتون ها را بشمارند. به همین دلیل گستره پویا محدود به تاریک ترین تونالیته است، وقتی طرح ها دیگر قابل تشخیص نیستند. ما این را سطح سیاهی می نامیم. سطح سیاهی محدود به میزان دقت اندازه گیری هر فوتوسایت است، و به همین سبب به خاطر نویز عکس در تاریکی محدود است. پس گستره پویا کلا در ایزوهای پایین تر و در دوربین های با نویز محاسبانی کمتر افزایش می یابد.
نکته: حتی اگر یک فوتوسایت بتواند تک فوتون ها را بشمارد، باز محدود به نویز فوتون خواهد بود نویز فوتون با تغییرات آماری در هنگام رسیدن فوتونها ایجاد می شود و به همین خاطر از لحاظ تئوری وجود حداقل نویز را عنوان می کند. نویز کلی مجموع نویز فوتونها و نویز بازخوانی اطلاعات است.
در مجموع، گستره پویای یک دوربین دیجیتال را می توان این گونه تعریف کرد: نسبت حداکثر شدت نور قابل اندازه گیری (در حالت اشباع پیکسل)، به حداقل شدت نور قابل اندازه گیری بالاتر از نویز باز خوانی
تصویر دیجیتالی
تصاویر دیجیتالی، تصاویری سنجش شده اند که از تعداد زیادی مربعات کوچک (پیکسل) تشکیل می شوند که هر پیکسل دارای یک شماره رقمی میباشد که بیانگر مقدار روشنایی آن پیکسل است شکل یک تصویر را می توان توسط تابع دوبعدی f(x,y) نشان داد که در آن x و y را مختصات مکانی و مقدار f در هر نقطه را شدت روشنایی تصویر تک رنگ (سطح خاکستری در آن نقطه می نامند. تصاویر رنگی نیز از تعدادی تصویر دو بعدی تشکیل می شود. زمانی که مقادیر x و y و مقدار f(x,y) با مقادیر گسسته و محدود بیان شوند. تصویر را یک تصویر دیجیتالی می نامند. دیجیتال کردن مقادیر x و y را Sampling و دیجیتال کردن مقدار f(x,y) را quantization گویند. برای نمایش یک تصویر M* N از یک آرایه دو بعدی (ماتریس) که M سطر و Nستون دارد استفاده میشود.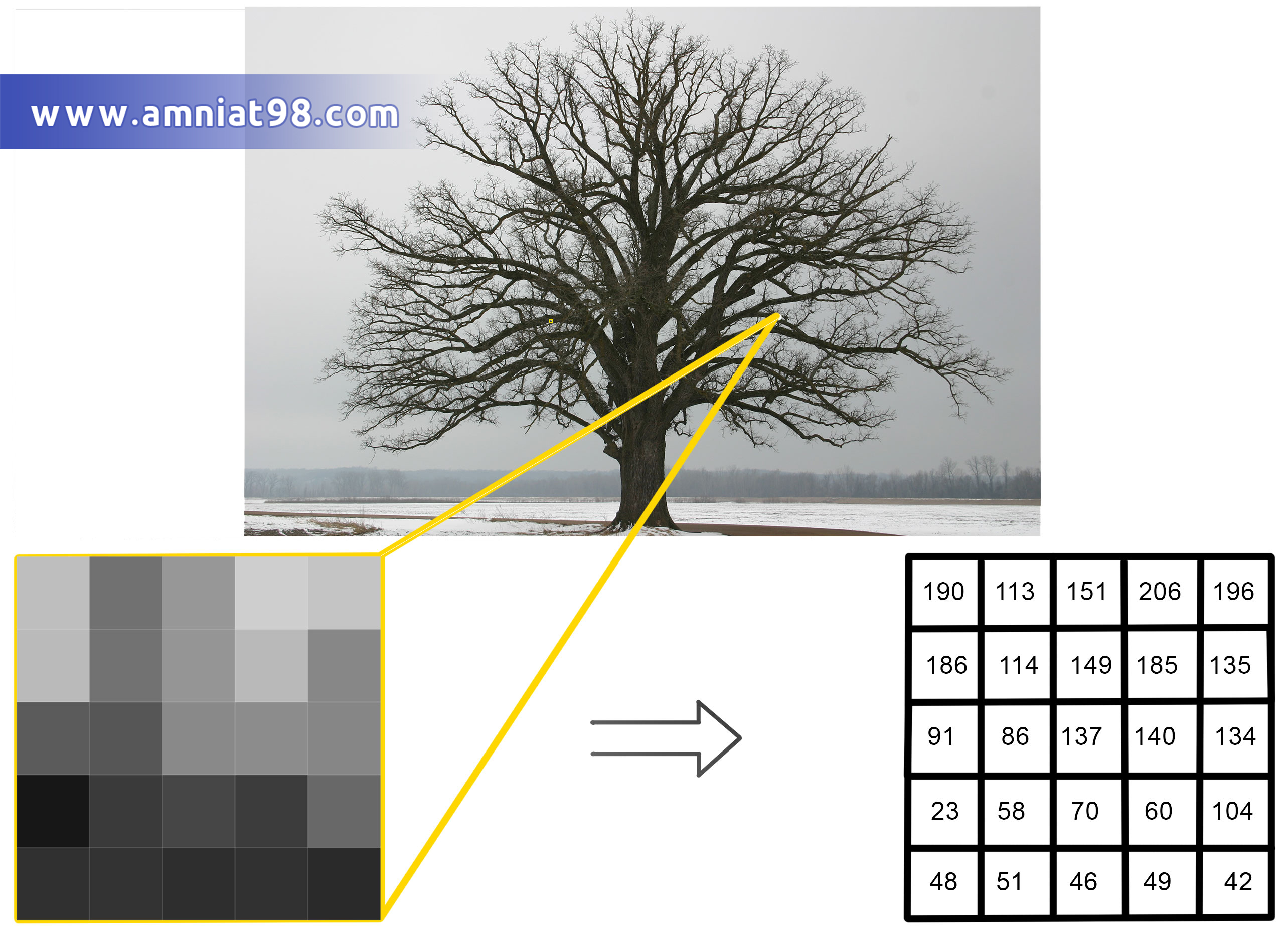
مقدار هر عنصر از آرایه نشان دهنده شدت روشنایی تصویر در آن نقطه است. هر عنصر آرایه یک مقدار ۸ بینی است که می تواند مقداری بین ۰ و ۲۵۵ داشته باشد. مقدار صفر نشان دهنده رنگ تیره (سپاه) و مقدار ۲۵۵ نشان دهنده رنگ روشن (سفید) است.
به عنوان مثال تصویر هر پیکسل از شکل ۳۵ مقداری بین ۰ و ۲۵۵ دارد. نقاط روشن مقادیری نزدیک به ۲۵۵ و نقاط تیره مقادیر نزدیک به ۰ دارد. همه توابع پردازش تصویر از این مقادیر استفاده می کند و اعمال لازم را بر روی تصویر انجام میدهند.
بنابر این کل یک فریم تصویر سیاه و سفید را می توان به صورت یک ماتریس نمایش داد. این ویژگی یکی از فوائد مهم تصویر در محیط دیجیتال است، زیرا بسیاری از اعمال ریاضی که برای ماتریس ها تعریف شده اند، مانند عملیات or and و یا تبدیل هایی مانند انتقال، دوران و غیره را به کمک این اعمال پابهای ریاضی می توان به بسیاری از عملیات تصویری بدل نمود.
در تصاویر رنگی همان شرایط تصاویر سیاه و سفید برقرار است، ولی برای هر فریم سه ماتریس Red (قرمز)، Green (سبز) و Blue (آبی) و به صورت مجزا۲۵۶ سطح وجود دارد.
دقت تصویر
دقت تصویر بستگی به شماره پیکسل ها دارد. با یک تصویر دو بیتی، حداکثر دامنه روشنایی ۴ میباشد که دامنه آن از ۰ تا ۳ تغییر می کند. در این حالت تصویر دقت تفکیک پذیری لازم را ندارد. تصویر ۸ بیتی حداکثر دامنه ۲۵۶ دارد و تغییرات آن بین ۰ تا ۲۵۵ است که دقت بالاتری دارد .

خاکستری کردن تصویر
در رایج ترین مدل رنگ گرافیک کامپیوتری، رنگ ها از ترکیب سه رنگ قرمز، سبز و آبی به وجود می آیند که در مجموع ۱۶۵۸۱۳۷۵ رنگ متفاوت توسط این سه مولفه می توان تولید کرد. این مدل رنگ در گرافیک کامپیوتری با نام RGB شناخته می شود. در کنار مدل رنگ RGB مدل های دیگری همچون HSV، MSI ، CMYK و Grayscale نیز وجود دارد که هریک از آنها به روش متفاوتی به نمایش رنگ ها می پردازند. در این بین مدل رنگ Grayscale از اهمیت ویژه ای برخوردار است، چرا که در بیشتر کاربردها نیازی به یک تصویر رنگی نمی باشد و داشتن تنها یک تصویر خاکستری کافی خواهد بود، در میان عموم، تصویر خاکستری با نام تصویر سیاه و سفید شناخته می شود (البته استفاده از نام سیاه سفید به جای خاکستری اشتباه است و در اینجا فقط برای روشن تر شدن مطلب از این نام استفاده شده است).یک تصویر RGB متشکل از سه ماتریس است که هریک از آنها مقادیر G، R و B تصویر رنگی را نگه می دارند. نمایش تصویر بر روی صفحه نمایش نیز از ترکیب مقادیر درایه های متناظر در سه ماتریس انجام می پذیرد. یک پیکسل زمانی مقدار خاکستری خواهد داشت که مولفه های R ,G ,B آن مقادیر یکسانی داشته باشند. از آنجا که مقادیر ماتریس های G ,R و B پس از Grayscale کردن تصویر با هم برابر هستند، بنابراین می توان تنها از یک ماتریس برای نشان دادن مقادیر استفاده کرد در الگوریتم های بعدی که برای پردازش تصویر ارائه خواهند شد از تصاویر Grayscale استفاده خواهد شد. بنابراین عملیات نیز بر روی تنها یک ماتریس انجام خواهد پذیرفت.
هیستوگرام تصویر
هیستوگرام تصویر نموداری است که توسط آن تعداد پیکسل های هر سطح روشنایی در تصویر ورودی مشخص می شود. اگر تصویر ورودی یک تصویر خاکستری با ۲۵۶ سطح روشنایی باشد. هر یک از پیکسل های تصویر مقداری در بازه صفر تا ۲۵۵ می توانند داشته باشند. برای به دست آوردن هیستوگرام تصویر، کافی است با پیمایش کل پیکسل های تصویر، تعداد پیکسل های هر سطح روشنایی محاسبه شود. هیستوگرام ترمال نیز از تقسیم کردن مقادیر هیستوگرام به تعداد کل پیکسل های تصویر به دست می آید، نرمال سازی هیستوگرام موجب می شود که مقادیر هیستوگرام در بازه صفر تا یک قرار گیرند، شکل اختلاف نمودار هیستوگرام بین دو تصویر یکی با تباین (تضاد) کم و دیگری با تباین معمولی نشان داده شده است.

یکی از کاربردهای هیستوگرام در تمرکز خودکار دوربین های دیجیتالی است. بدین صورت که لنز دوربین از ابتدا تا انتها حرکت کرده و در هر گام از حرکت خود تصویری از صحنه می گیرد. سپس کنتراست تصویر گرفته شده را با استفاده از هیستوگرام أن محاسبه می کند. پس از آن که لنز به انتهای حرکت خود رسید محلی از لنز که در آن تصویر دارای بیشترین تضاد خود بوده است، به عنوان محل لنز تعیین می شود.
![]()




